La plateforme qui rend les déplacements dans l'espace public réellement planifiables.

La plateforme qui rend les déplacements dans l'espace public réellement planifiables.
 LE PROBLÈME
LE PROBLÈME
Se déplacer avec un fauteuil roulant, une poussette, des cannes, un rollator, etc suppose de rencontrer de nombreux obstacles, tels que
- les pentes
- la présence de marches
- la largeur et la hauteur des trottoirs
- les revêtements de sol
- la continuité des parcours
- l’accessibilité aux plateformes des transports en communs
- etc
Aujourd’hui, aucune application ne rassemble ces informations et ne pemet de les prendre en compte dans la planification des déplacements. Un trajet peut sembler possible… et se révéler impraticable.
 LA SOLUTION
LA SOLUTION
Nous agissons sur deux niveaux complémentaires
1. Produire des données fiables
En collectant et structurant des données d’accessibilité dans l’espace public.
2. Développer un outil de navigation adapté
En concevant un logiciel capable d’utiliser ces données pour proposer des itinéraires réellement adaptés à différents profils de mobilité.

 COMMENT CELA FONCTIONNE
COMMENT CELA FONCTIONNE
Les différentes couches du système
COMMENT CELA FONCTIONNE
Les différentes couches du système

Base cartographique
Utilisation d'OpenStreetMap comme couche de base.
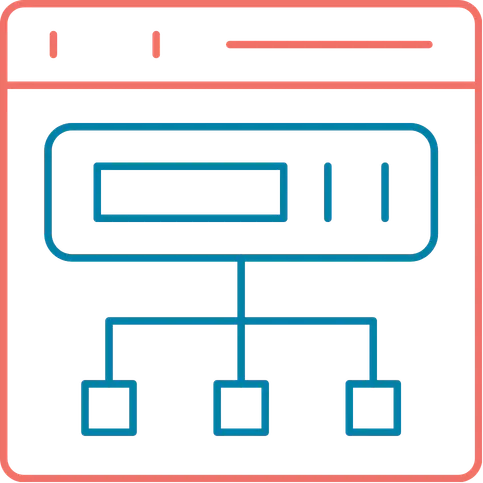
Architecture
Ajout des objets manquants et leurs attributs (ex: marches et leur hauteur)
Segmentation
Division de l'espace public en segments de parcours distincts et analysables

Données
Collecte des données sur le terrain, centralisation et validation par les pairs
Itinéraires
Développement de l'algorithme de navigation pour les calculs d'itinéraires
Personnalisation
Intégration de données supplémentaires (transports, points d'intérêts, etc)
 LES ÉTAPES DE NOTRE PROJET
LES ÉTAPES DE NOTRE PROJET 
